Real-Time Locating Systems (RTLS, dt. Echtzeit-Ortungssysteme) gelten als Schweizer Taschenmesser im Bereich der flexiblen und vernetzten industriellen Automatisierung und datengesteuerten Optimierung. Insbesondere im Bereich der Lager-Intralogistik und Produktionsoptimierung gibt es einen Boom bei der Nutzung von Echtzeit-Positionsdaten. Im Cyber-Physical Factory Labor des IAS ist ein Ultra-wideband-basiertes Real-Time-Locating System installiert. Damit wird die Verbesserung der Mensch-Roboter-Interaktion erforscht. Die Vorhersage zukünftiger Bewegungstrajektorien von autonom agierenden Menschen ermöglicht es mobilen Roboter vorausschauend zu agieren und positionsabhängige Automatisierungsroutinen optimiert durchzuführen.
Was ist ein Real-Time Locating System?
Satellitengestützte Ortungssysteme erleichtern den Alltag und weisen uns in Navigationsanwendungen den Weg oder erinnern uns daran, wo ein Foto aufgenommen wurde. Ein Real-Time Locating System benötigt sowohl Hardware als auch Software, um Positionen zu bestimmen und diese Daten mit anderen Anwendungen zu teilen. In Outdoor-Szenarien mit freier Sicht zum Himmel, können Global Navigation Satellite Systems (GNSS) wie GPS, Galileo, GLONASS oder Beidou eingesetzt werden, um Echtzeit-Positionsdaten zu erhalten.
In der Welt der Fabrik-, Anlagen- und Lagerautomatisierung, dominieren Indoor- oder Hybrid-Szenarien, in denen eine GNSS-basierte Positionsbestimmung nicht möglich oder nicht genau genug ist. Stattdessen werden Indoor-Positioning Systems (IPS) eingesetzt. Im Automatisierungssektor werden die Begriffe IPS und RTLS oft synonym verwendet, da industrietaugliche RTLS auf IPS-Lösungen basieren. Obwohl IPS nicht neu sind, haben diese mit dem Aufkommen preisgünstigen Ultrabreitband-Chips (UWB, ultra-wideband) neue Bedeutung für die Automatisierungstechnik erhalten.
Es gibt viele Techniken, um Entfernungen mit Funkwellen zu messen oder Positionen mit Kameras zu bestimmen, die Lokalisierung mittels Ultra-wideband (UWB-RLTS) ist jedoch die für die meisten industriellen Anwendungsfällen die überlegene Technologie aufgrund folgender Eigenschaften:
- sehr genau (ca. 0,5 m im Real-Einsatz)
- sehr dynamisch (bis zu ca. 5 Hz im Real-Einsatz, also 5 Positionsmesswerte pro Sekunde)
- vergleichsweise wenig störanfällig in Umgebungen mit viel Metalloberflächen
- Verglichen mit 5G (Mobilfunk, kann aber auch zur Lokalisierung eingesetzt werden) deutlich günstiger
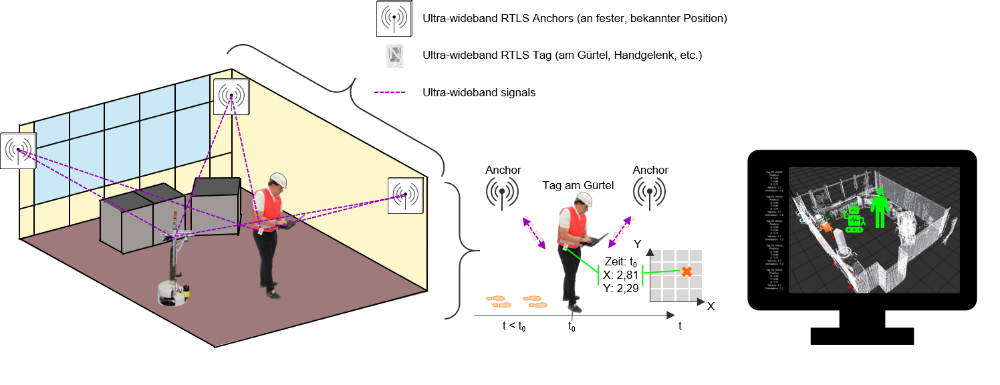
UWB-basierte RTLS erfordern Hardware-Knoten mit bekannten Positionen, oft Anchor oder Wandeinheiten genannt, um die Position von tragbaren Knoten, sogenannte Tags, zu bestimmen. UWB-basierte RTLS-Systeme nutzen ähnlich zu GPS Verfahren der geometrischen Analyse zur Bestimmung der Position der Tags. Tags sind kleine, oft batteriebetriebene Geräte, die an jedem beliebigen Objekt angebracht (oder darin integriert) werden können. Tags und Anchors kommunizieren über Ultrabreitband-Signale.). Der mit IEEE 802.15.4a und 802.15.4z standardisierte Frequenzbereich für UWB RTLS liegt zwischen 3,1 GHz und 10,6 GHz, wobei in der Regel nur ein Teil dieses Bereichs benötigt wird, so dass ein WiFi-basiertes Netzwerk kann auch bei 5 GHz betrieben werden.
Welches Real-Time Locating System nutzt das IAS?
Am IAS ist im Cyber-Physical Factory Labor ein Two-Way-Ranging-, Ultra-Wideband-basiertes Real-Time Locating System installiert, welches auch in Räumen mit normaler Raumhöhe gut funktioniert und eine Genauigkeit von ca. 20 cm aufweist. Das IAS nutzt insgesamt 5 Anchors bzw. Wandeinheiten mit bekannter Position, welche dann wiederum die Ortung der tragbaren Tags ermöglichen. Wenn die Fläche des Labors nicht ausreicht, nutzt das IAS baugleiche Systeme in der Forschungsfabrik Arena 2036 (https://www.arena2036.de/de/).
Was wird damit erforscht?
Die präzise und mehrmals in der Sekunde wiederholte Lokalisierung ist gut geeignet um die Dynamik sich bewegender Roboter oder Menschen zu erfassen. Daraus können dann mit angepassten Methoden der Trajektorienvorhersage zukünftige Positionen vorhergesagt werden, was insbesondere für Menschen interessant ist, da sich diese autonom verhalten. Konkret soll mittels der Vorhersage menschlicher Bewegungstrajektorien das Zusammenwirken von Menschen und mobilen Robotern wie beispielsweise Automated Guided Vehicles (AGV) und Autonomous Mobile Robots (AMR) verbessert werden. Links zu den Veröffentlichungen: https://www.researchgate.net/project/Real-Time-Locating-System-RTLS-for-the-production-sector

Publikationen zum Real-Time Locating System und Trajektorienvorhersage
2021
- A. Löcklin, T. Jung, N. Jazdi, T. Ruppert, and M. Weyrich, “Architecture of a Human-Digital Twin as Common Interface for Operator 4.0 Applications,” Procedia CIRP, Vol. 104, pp. 458-463, September 2021, 2021, doi: 10.1016/j.procir.2021.11.077.
- A. Löcklin, H. Vietz, D. White, T. Ruppert, N. Jazdi, and M. Weyrich, “Data administration shell for data-science-driven development,” Procedia CIRP, vol. 100, pp. 115-120, Mai 2021, 2021, [Online]. Available: https://doi.org/10.1016/j.procir.2021.05.019
- A. Löcklin et al., “Tailored digitization with real-time locating systems: Ultra-wideband RTLS for production and logistics,” atp magazin vol. 63, no. 3, pp. 76-83, März, 2021, 2021, doi: 10.17560/atp.v63i03.2550.
2020
- A. Löcklin, T. Ruppert, L. Jakab, R. Libert, N. Jazdi, and M. Weyrich, “Trajectory Prediction of Humans in Factories and Warehouses with Real-Time Locating Systems,” in 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), 8-11 Sept. 2020, Vienna, Austria, pp. 1317-1320, 2020. doi: 10.1109/ETFA46521.2020.9211913.